汽车头条App

汽车头条公众号

当前位置: 首页 正文
 用手机看
用手机看
手机扫码看
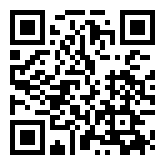
2025年成为中国智能驾驶领域的分水岭,各大车企的智能驾驶系统纷纷告别过去的“模块堆砌”方式,从依赖规则算法到端到端大模型,进而演进到VLA(视觉-语言-行动)多模态大模型,智能驾驶技术正以前所未有的速度进化。
传统智能驾驶系统像一条流水线:感知模块识别周围环境、预测模块判断他人意图、规划模块决定行驶路径、控制模块操作车辆执行,信息在传递过程中会有一定的损耗。而端到端大模型彻底改变了这一流程。它更像人类一样思考:从感知到决策成为一个整体,模仿人类大脑的综合处理能力。

当然,除了智驾大模型外,目前其实在技术路线、硬件竞赛以及算法上,国内第一梯队的车企和供应商都有自己的考量。
技术路线:纯视觉与多传感器融合的战略分歧
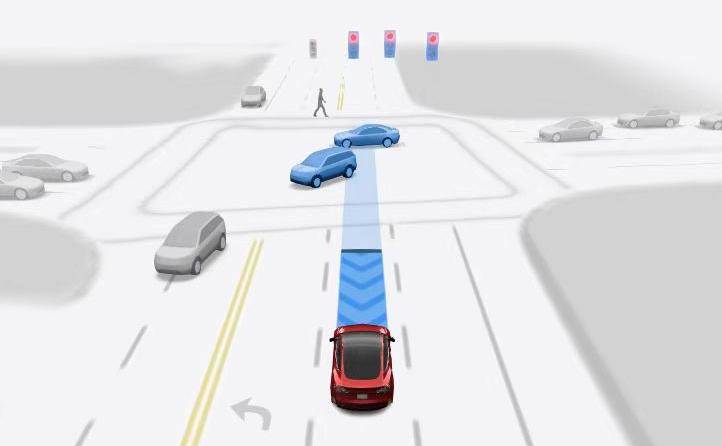
目前,智能驾驶领域存在两条截然不同的技术路径。特斯拉坚持纯视觉方案,依靠8颗摄像头和神经网络算法模拟人类驾驶逻辑。

这种方案优点是硬件成本低,升级方便,响应速度快,在北美地区高速场景表现成熟。但其劣势在中国复杂路况下被放大:易受极端天气和光线干扰,面对中国特有的加塞车辆、非标交通标识时,感知能力会明显下降。
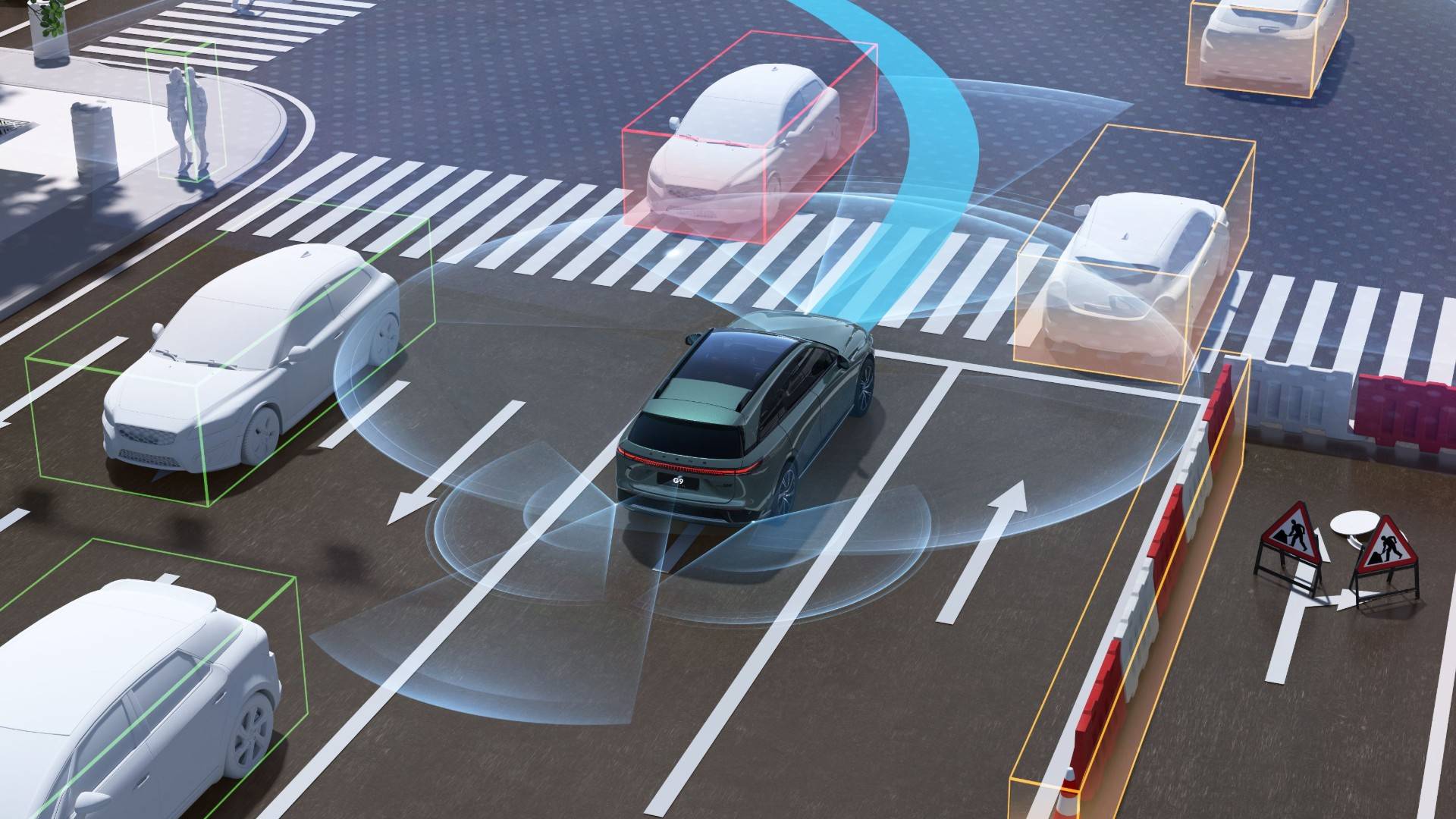
而华为、小鹏、理想等中国品牌则选择了多传感器融合路线,标配激光雷达、毫米波雷达和高清摄像头,结合高精度地图实现360°环境感知。

硬件竞赛:算力飙升与芯片自研成为新战场
除了感知硬件以外,智能驾驶的算力硬件和芯片竞赛也日趋白热化。下面整理了一个表格,可以让大家快速了解各家的核心配置和特点:

虽然表格里的TOPS数字很直观,但实际智能驾驶体验的好坏,并不仅仅取决于芯片的峰值算力高低。芯片的算力能否被高效利用,即"有效算力"才是关键。而且越来越多的厂商(如特斯拉、华为、小鹏)选择自研或深度定制芯片,就是为了让硬件更好地适配自己的软件算法,最大化发挥效能。
值得一提的是,作为第三方方案供应商的Momenta也在推进芯片自研计划。其第二代芯片传输算力或已达到600 TOPS左右,综合性能对标英伟达Thor和高通骁龙Ride Flex9。Momenta的目标是将高阶辅助驾驶整套方案的成本压到5000元级别,这可能会颠覆行业定价模式。
算法突破:VLA大模型引领智能驾驶新纪元
虽然都叫端到端大模型,但各车企的技术路线却大相径庭。其中,特斯拉的纯视觉一段式端到端极具颠覆性但略显激进;华为则在融合感知和生成式端到端规划方面,展现出强大的工程化能力;理想、小鹏等紧随其后,纷纷探索端到端与VLA等新技术的结合,其中小鹏还采用云端大模型蒸馏车端模型的策略;比亚迪则通过灵活的分级策略,推动智驾普及。至于Momenta等供应商,虽然也是一段式端到端路线,但会通过强化学习等方案为多家车企提供支持。

现实考验:本土化能力成为致胜关键
在中国市场的实际表现中,本土化适配能力成为智能驾驶系统的试金石。特斯拉尽管在上海建立数据中心,但核心算法仍由北美团队主导,FSD在中国尚未完全开放。受法规限制,其实际迭代速度落后于北美版本。
华为、理想、小鹏、比亚迪等品牌,依托中国本土研发团队,深度定制符合国情的驾驶策略,更贴合本土用户习惯。但不管结果如何,硬件成本正在快速下降,智能驾驶的竞争已进入了一个由数据、算力和算法共同驱动的新阶段。未来的竞争格局有会怎么样呢?咱们拭目以待!对于智驾的发展,你又怎么看?欢迎关注“车域无疆”,在下方评论区留言,分享你的看法。

评论 0
作者信息

作品:5442
+关注
认证:头条客认证自媒体
介绍:汽车之家说客超级评论员。秉承客观、科学的立场,以数据说话,坚持打造原创高质量汽车自媒体。想更深入地了解汽车,从关注微信公众号《车域无疆》开始!
更多资讯推荐